
 变换
变换
# 变换
Owner: -QVQ-
齐次坐标(投影坐标)
作用:用于投影几何里的坐标系统,可让包括无穷远点的点坐标以有限坐标表示,进行仿射变换,通常其投影变换能简单地使用矩阵来表示。
与笛卡尔坐标相比:齐次坐标公式表示通常更简单且对称,
定义:
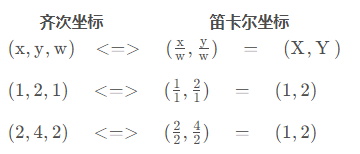
在齐次坐标里,需要两个值来表示在投影线上的一点,需要三个值来表示投影平面上的一点
例:( X , Y ) (X, Y)(X,Y) 在齐次坐标里面变成了 ( x , y , w ) ,并且有 X = x / w , Y = y / w (1,2) 的齐次坐标可以表示为 ( 1 , 2 , 1 ) ,如果点 ( 1 , 2 ) (1, 2)(1,2) 移动到无限远处,
然后它的齐次坐标表示为 ( 1 , 2 , 0 ) (1, 2, 0)(1,2,0) ,因为 ( 1/0 , 2/0 ) = ( ∞ , ∞ )
变换矩阵(记住坐标变换矩阵)
刚体变换:形状没变化,位置和方位改变
平移T

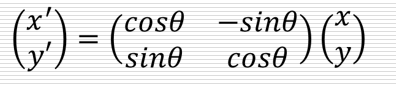
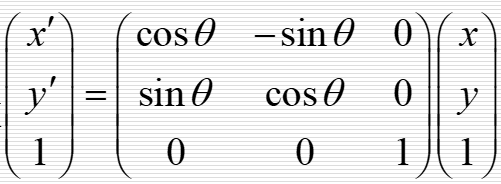
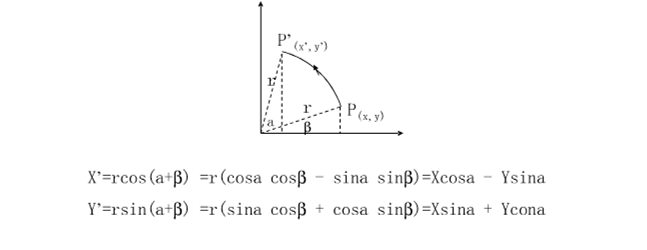
绕原点逆时针旋转R

笛卡尔坐标

(非线性变换)
笛卡尔坐标
(线性变换)
齐次坐标变换

齐次坐标变换
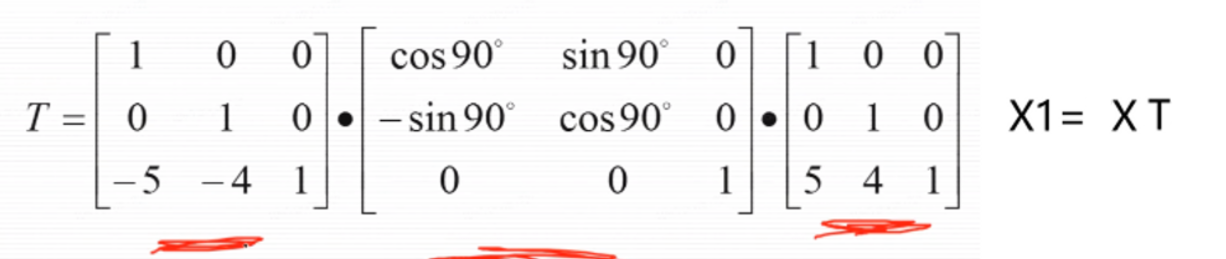
上诉是变换矩阵在坐标点的左侧,如果变换矩阵在坐标点的右侧
例:将下面的多边形围绕点P逆时针旋转90

以下两个方法一样:
X1为新的坐标点,X为旧的x,y,z坐标

- 证明
**仿射变换:**
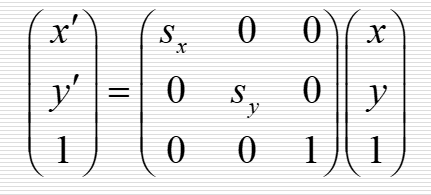
**放缩S**
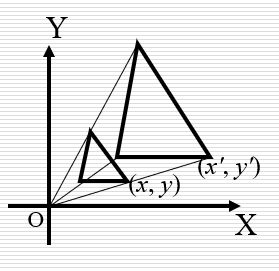
笛卡尔坐标

(线性变换)sx和sy为x和y分量的放缩比例
齐次坐标
二维变换具有结合性:(AB)C=A(BC)、不具有交换性
线性变换:笛卡尔坐标中可以通过一个矩阵实现
非线性变换:笛卡尔坐标中不可以通过一个矩阵实现
变换流程: 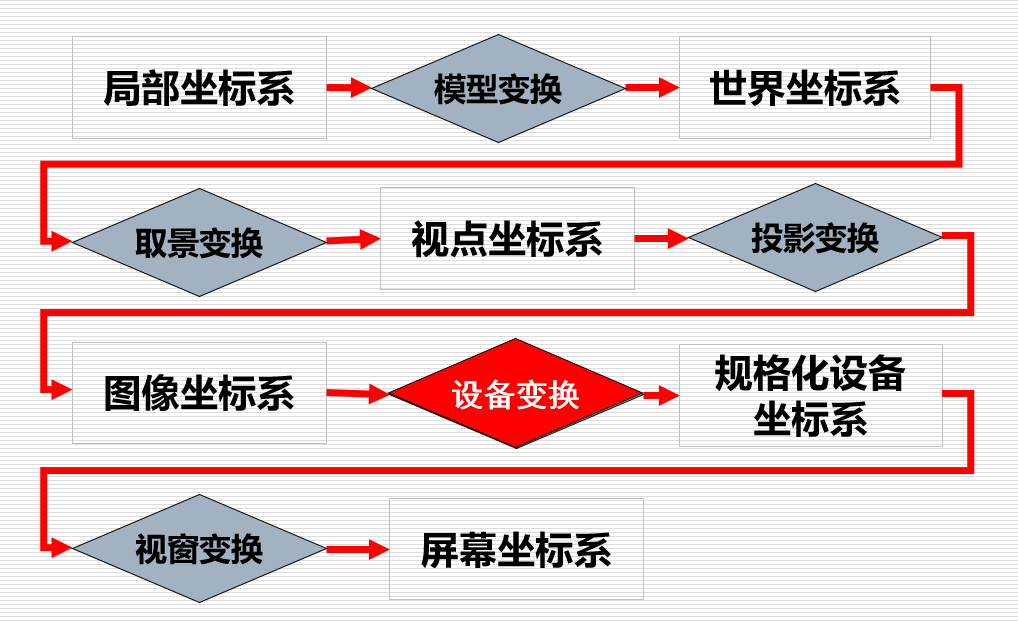
三维变换流程图
模型变换(在场景坐标系下)
物体从建模坐标系到世界坐标系的变换(包括三维线性和非线性变换)
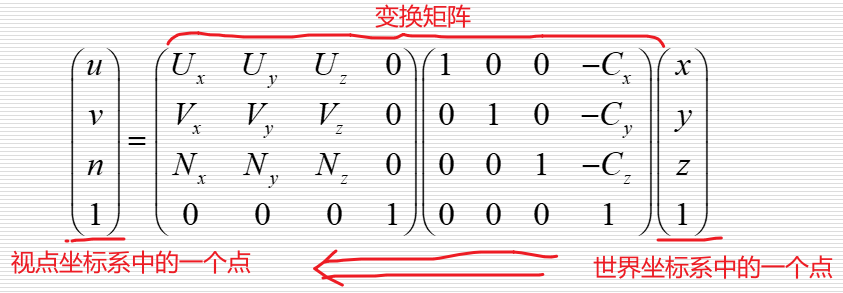
取景变换(生成视点坐标系)
视点坐标系定义于世界坐标系中
需要确定:
相机的位置C:坐标原点C=(Cx, Cy, Cz)
镜头的朝向N:单位向量N=(Nx, Ny, Nz)
计算V:(计算后单位化)(代表镜头朝向与UP向量的夹角)

UP:与镜头朝向不平行的向量
计算U:(计算后单位化)

以上四个矢量C、U、V、N组成视点坐标系,从而得到世界坐标系到视点坐标系的变换
投影变换(在视点坐标系中,将三维场景变为二维图像(二维齐次坐标),生成图像坐标系)
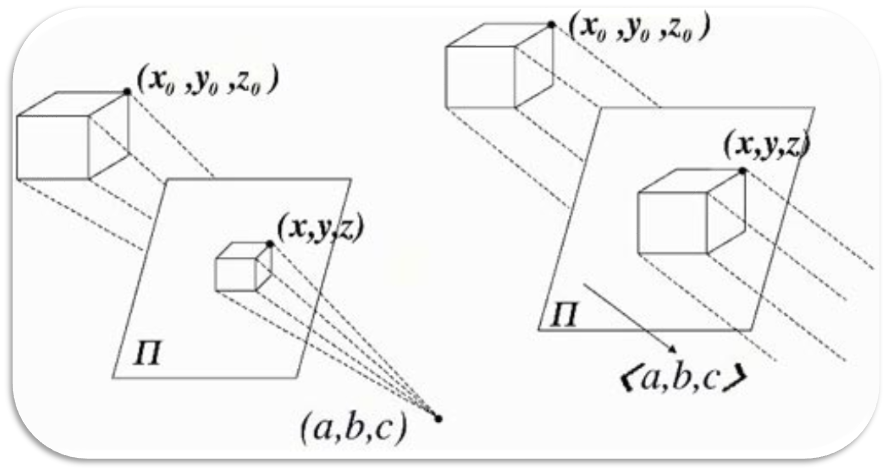
透视投影:符合人类的视觉特点,产生的投影效果更为真实
投影点:通常取视点坐标系中(0, 0, 0)点 投影平面:取作与视线方向(N方向)垂直的平面n = d。假设在视点坐标系中的点为(u, v, n),那么在投影面上的对应点坐标(up, vp)为

平行投影:物体的相对度量保持不变,适用于建筑和机械设计
剪裁
位于视域四棱锥内部的几何物体被投影在投影平面上,位于外部剔除。部分位于内部,需裁剪
设备变换(生成规格化坐标系)
投影后二维齐次坐标除以最后一个坐标分量W,便得到了规格化设备坐标
视窗变换(生成屏幕坐标系)
屏幕坐标系:通常以像素为单位 视窗变换: 二维变换:将定义在视窗中的规格化设备坐标转换到以像素为单位的屏幕坐标 **扫描转换:**将连续的几何物体转换为离散的光栅表示

