
 边缘检测
边缘检测
# 边缘检测
Owner: -QVQ-
# 整体流程
目的:能提取信息为识别物体
包含:表面法向不连续(朝向不同),深度不连续(物体处在不同的物平面上),表面颜色不连续,光照不连续(阴影)
定义: 边缘是图像强度函数快速变换的地方 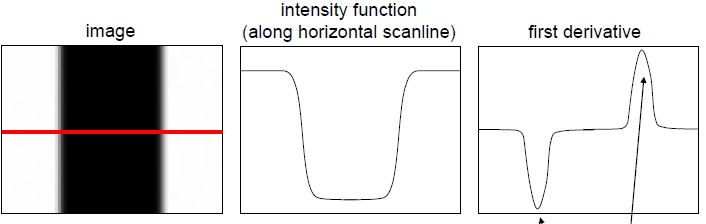
边缘强度带有一定的高斯噪声,如果直接对其求一阶导,无法识别边缘
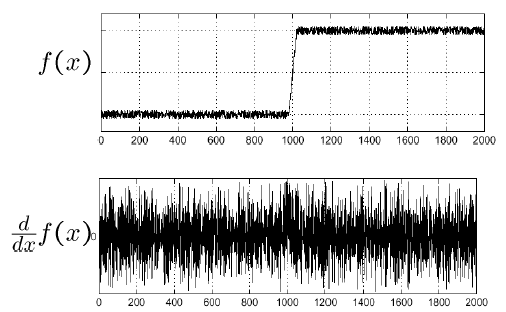
同时,一些滤波器对噪音很敏感,能让一些点远不同于周围的其他点。
因此,需要先对图像作平滑处理,f是原图,g是平滑滤波器
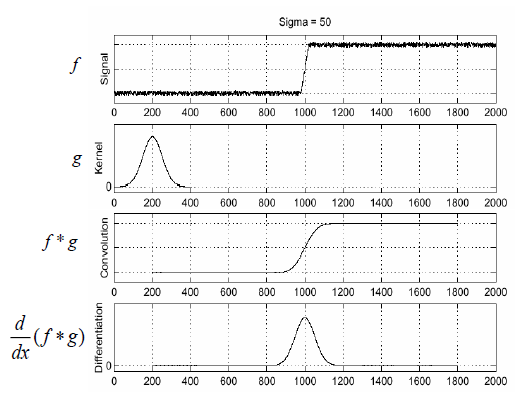
卷积满足交换律,因此先求积再卷积会加速运算

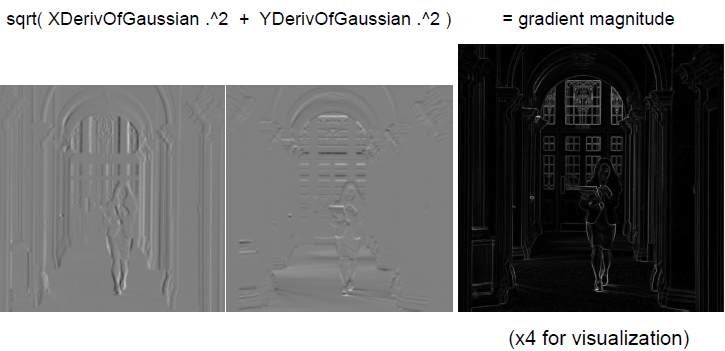
基于一阶导数:首先计算边缘强度, 通常用一阶导数表示, 例如梯度模,然后,用计算估计边缘的局部方向, 通常采用梯度的方向,并利用此方向找到局部梯度模的最大值。即:图像一阶导数中的最大和最小值来检测边界,通常是将边界定位在梯度最大的方向
基于二阶导数:……
一阶导数求边缘:
图像处理中,一阶求导

对于像素值的位置的最小单位是1px,因此

从公式上可以看出,就是右面的一个像素减去左面的一个像素,这个过程可以用卷积来代替。对卷积核来说,就是检测竖直方向的线条

平滑导数去除了噪声但也使图像模糊,因此需要选择合适的scales
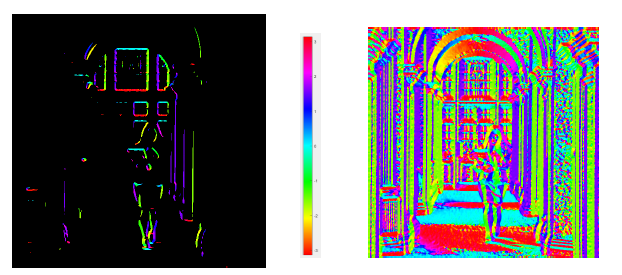
高斯一阶导数核(derivative filters):滤波器模板中的数值一定有负数,而且这些相加为0。
对于梯度的幅值,越大说明这个点附近像素值变化月剧烈,越有可能是边缘,梯度方向与边缘方向是垂直的

边缘检测的标准:
好的检测 ,能发现正确的边缘,忽略噪音和其他干扰
好的定位,返回的每一个点都是正确的点
边缘的编码:位置、梯度大小、梯度方向、模糊度
# Canny边缘检测

# 1.用高斯函数的x,y对图像进行滤波处理,
# 2.然后计算梯度幅值和方向
梯度幅值

计算梯度方向 
使用阈值对其进行第二次过滤,去除一些梯度相对较小的点。
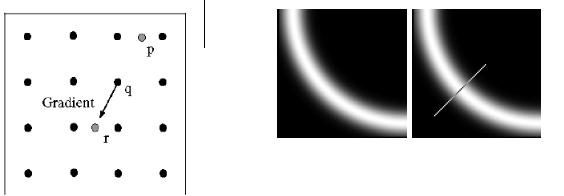
# 3.对每个点做非最大抑制:
对于点q如果r和p小于它则得到一个最大值,沿梯度方向做插值
原本的图案是均匀过度的,得到的边缘比较粗,非最大抑制后得到的边缘清晰
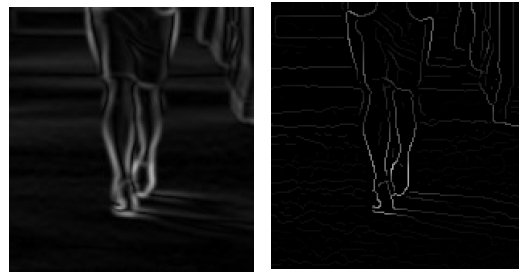
# 4.Hysteresis Thresholding
此时图像中出现的边缘出现断断续续的情况,这是因为设置的阔值太高 ,导致这部分被过滤掉了,设置的太低又会出现很多假边,所以可以使用双阔值法,设置 一个弱边,一个强边。图像大于高阔值的为强边,小于低阔值的为噪音,中间的为 弱边。
边缘从强边开始,持续跟进弱边

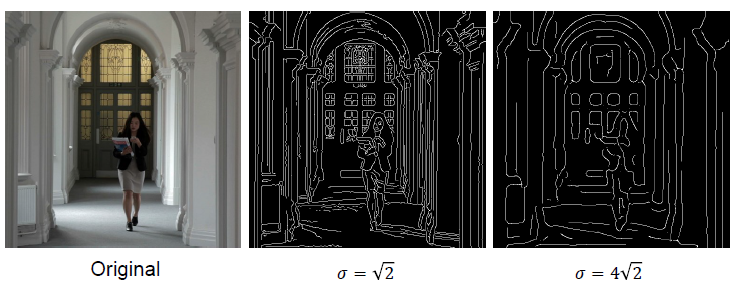
这里的参数取决于具体的要求,大的能检测到整体的轮廓,小的能检测到细致的边缘
MATLAB:edge(image,canny‘)

