场景的实例识别
场景的实例识别
# 场景的实例识别
Owner: -QVQ-
# 类别识别和实例识别的区别
# 类别识别:
找出图片中所有的人或物体
通常在一张图片里找
通常用滑动窗口的方法
# 实例识别:
在多个图片中找到具体的某个人或某个标志性建筑
通常只在数据库里的图片内找
# 需要解决的问题
# 如何总结整张图片的内容?
词袋向量的方法总结出图片的内容
比较词袋

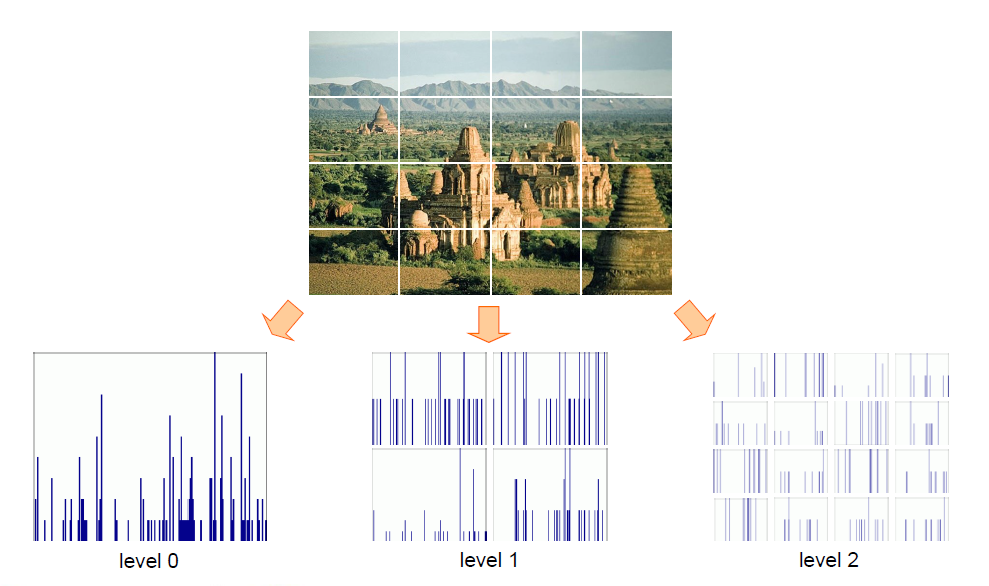
# 如何衡量整体相似度?
在不同分辨率的图片上进行比较
如果是简单的每个特征点逐一匹配对比,这个过程很慢。
当我们观察特征空间中相近的特征点时,每个特征点都要有相似的描述符,则表明这些特征点代表了相似的局部特征
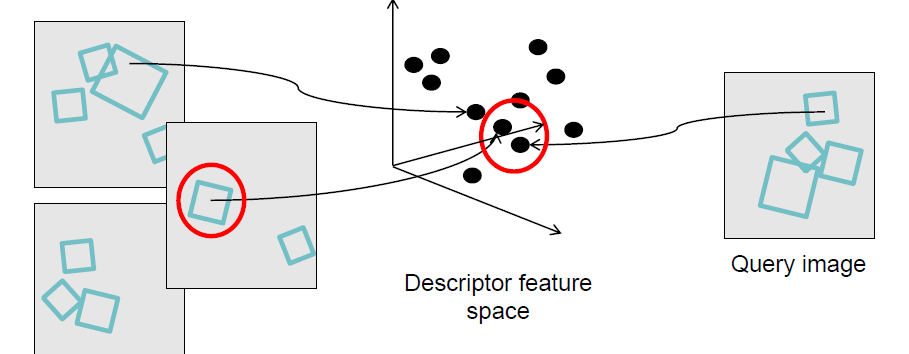
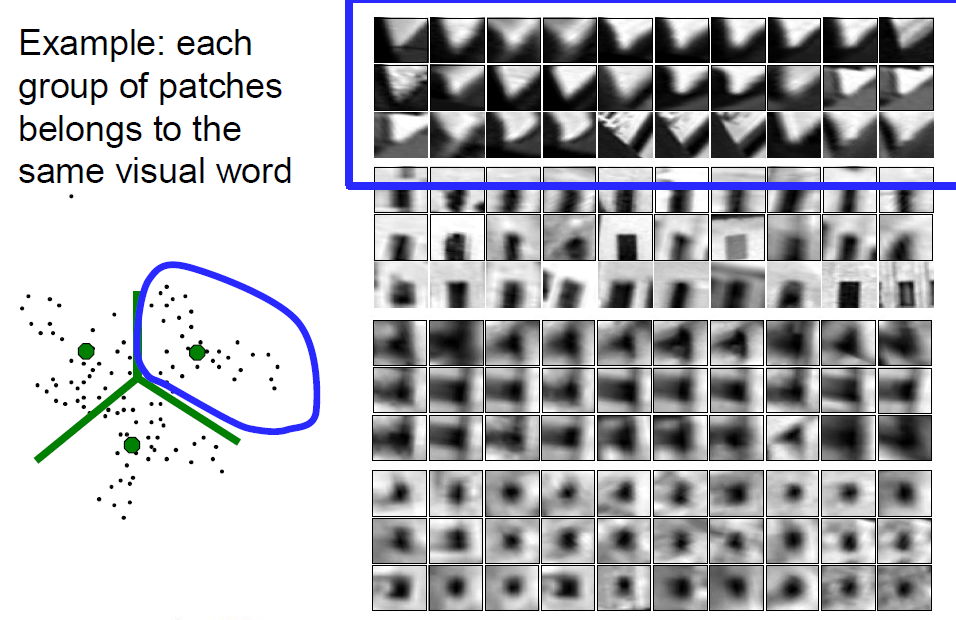
通过量化特征空间的方式讲高维的描述符映射到具体的词汇上。聚类中心为视觉词汇,将空间上的每个词汇分配给最近的聚类中心
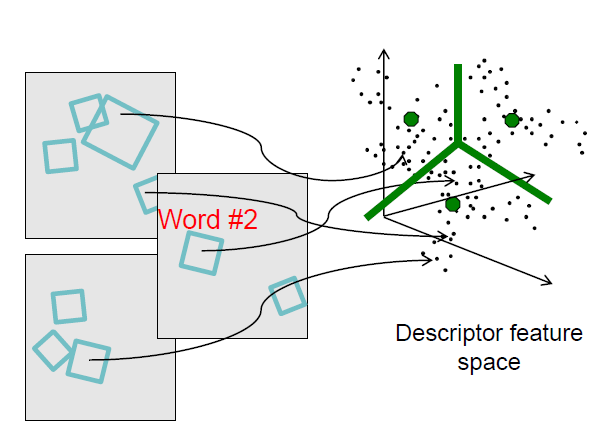
从而形成了多组,每一组都是相似的视觉词汇
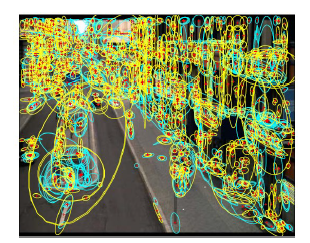
# 采样的策略
1 在特征点处松散的采样
通常对于有着明确纹理的物体能有很好的效果
2 统一的密集采样
3 自由的
4 多个特征点操作采样
时常有更全面的覆盖

对于文本内容来说,检索的最好方式是用索引,对于图像也是
# 反向索引:从数据库建立颠倒的索引
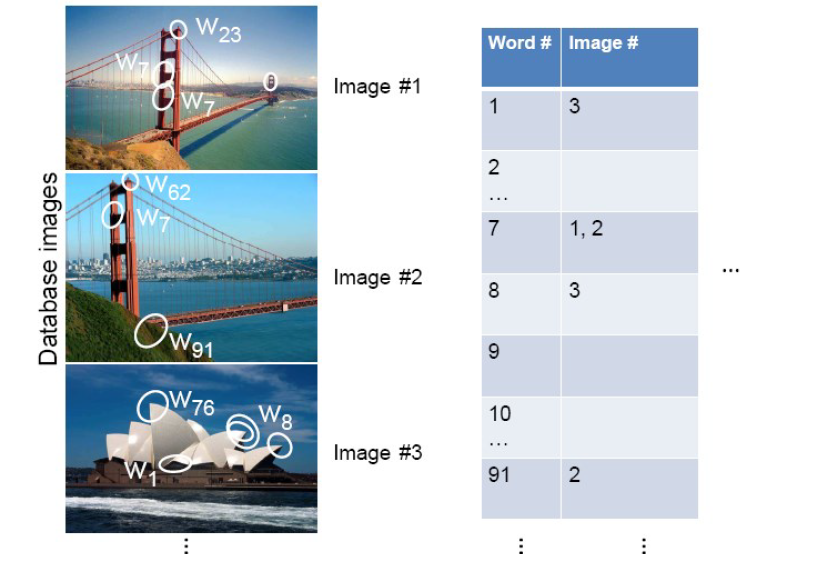
# 反向索引:查询索引
对于一张新图片,从中提取的特征点到数据库检索出对应有哪些图片包含这个特征点,排序匹配次数多的数据库里的图像

# 反向索引:优缺
适用于图片特征点比较稀疏、独特
如果数据库中很多图片中都有这些特征点,效率并不会比穷举法效率高多少
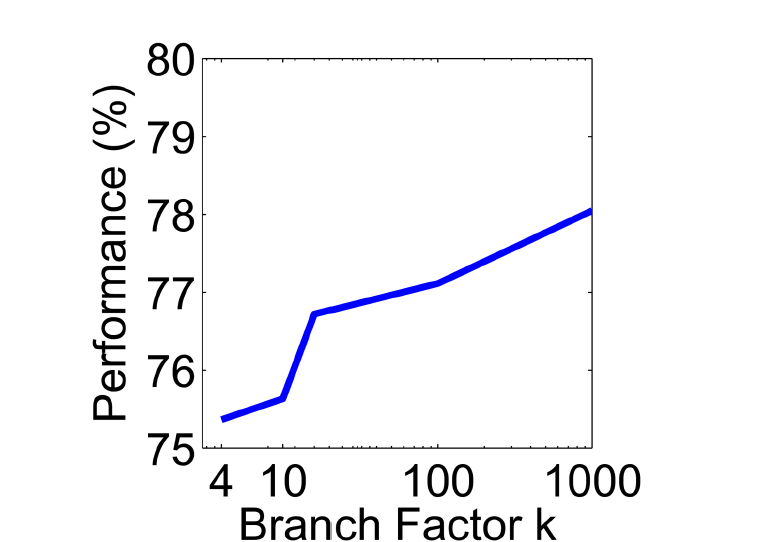
# 词汇量应该有多大?
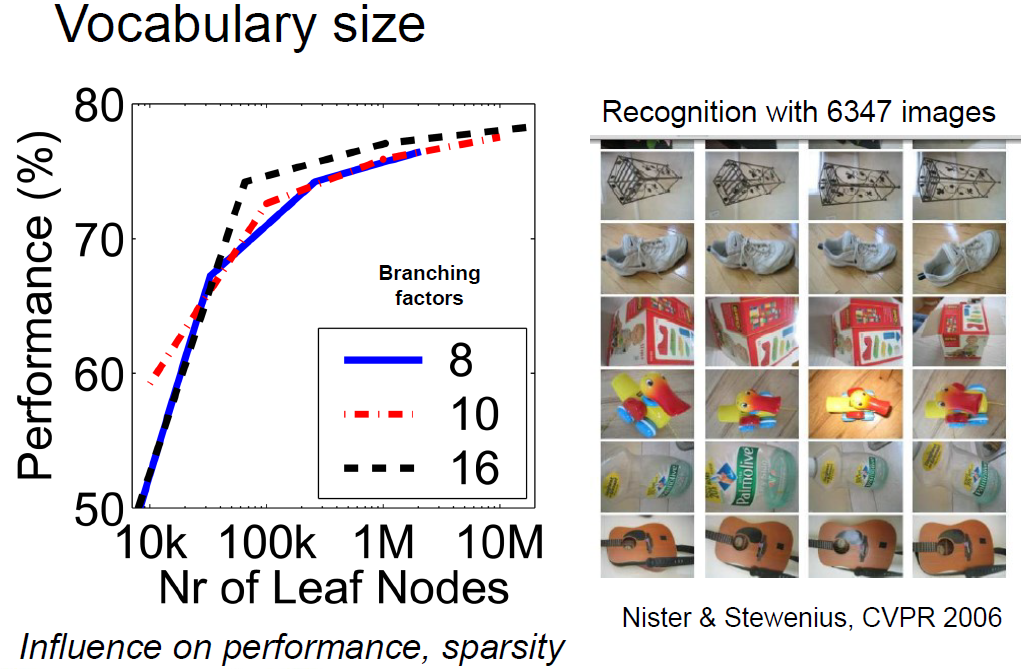
更多的分支树会产生更好的匹配效果,但会更影响性能
# 如何有效地进行量化?
+灵活的几何/变形/视点
+图像内容的紧凑总结
+为集合提供了固定维度的向量表示
+实践中效果好
-当袋子覆盖整个图像时,背景和前景混合->这真的是实例识别吗?
-最佳词汇形成方式尚不清楚
-基本模型忽略几何-必须事后验证,或通过特征编码
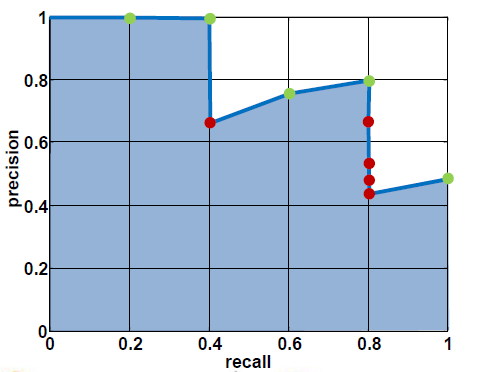
# 如何对检索结果进行评分?
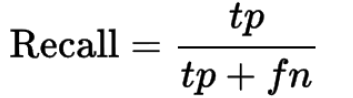
# Precision和Recall
True positive (tp):正确的接收了正确的点
True negative (tn):正确的拒绝了错误的点
False positive (fp):错误的接收了正确的点
False negative (fn):错误的拒绝了错误的点
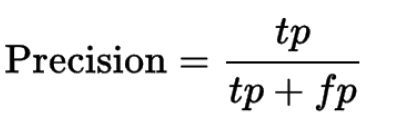
Precision:所有接收了的点中有多少是正确的
Recall:所有正确的点(tp+fn)中有多少是接收了的
下图为具体的10张图生成的图表
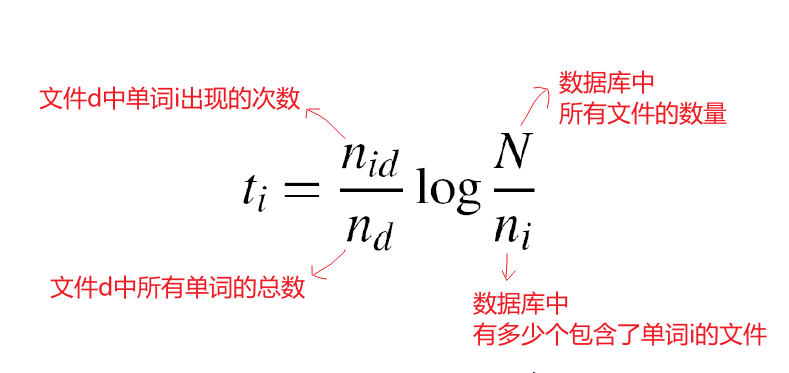
# ft-idf宽度
Term frequency inverse document frequency
根据图像中每个单词的出现频率来描述图像,降低数据库中经常出现的单词的权重
(文本检索的标准加权)
查询golf green问题:
基于原有图像检索到的图像再进行查询时,会出现不相关的内容
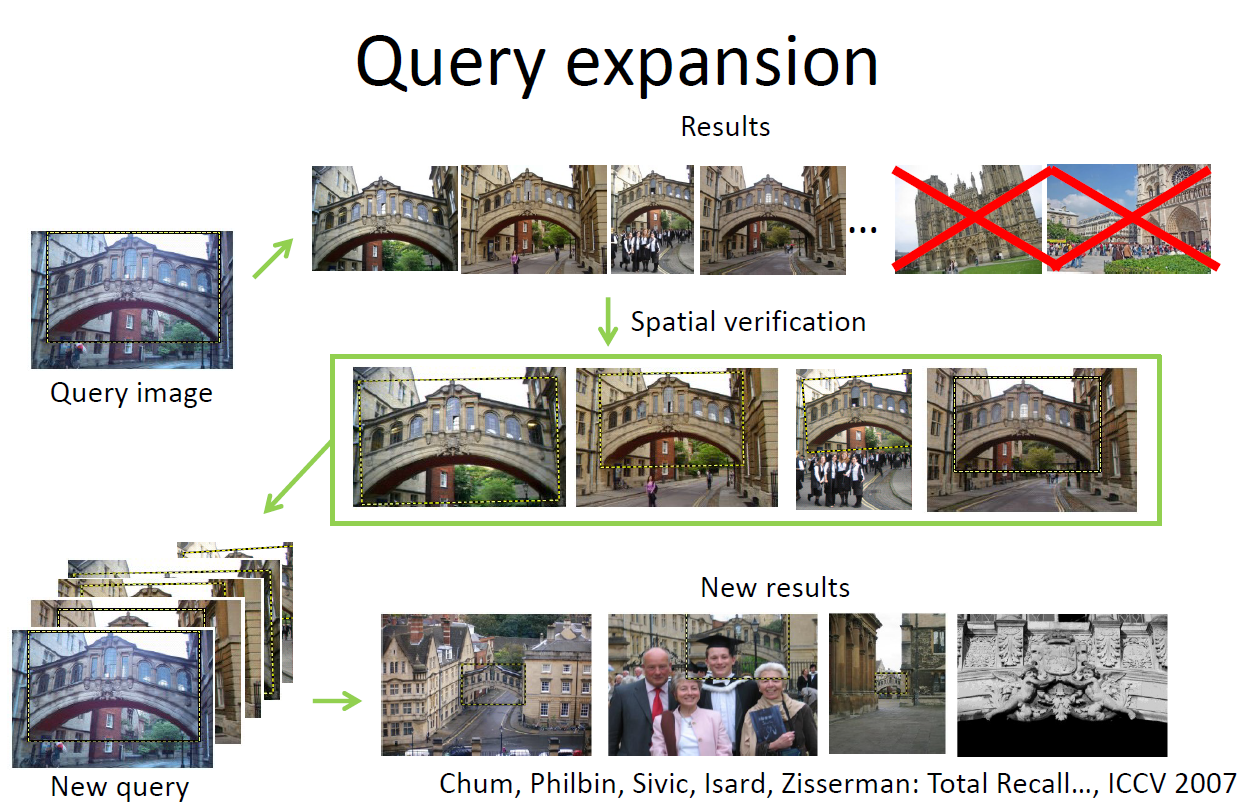
# 我们如何添加更多的空间验证?
到目前为止,我们对待每一个图像都对应一个 词汇包,没有空间信息。而真实的物体有一致的几何信息
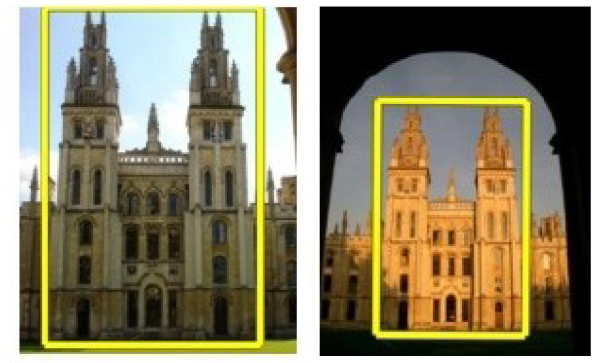
多视角的匹配
# RANSAC
先用Bow相似度排序
通过检查对可能的转换的支持(内线)来验证(例如:如果一个转换是>N个线条都匹配上了,则成功)
# Generalized Hough Transform
让每个匹配的特征对模型对象的位置、比例和方向进行投票-
用足够的选票验证参数
优点:
匹配准确度高
即使是杂乱的场景 也有好的匹配
缺点
性能差
不适用于类别的识别
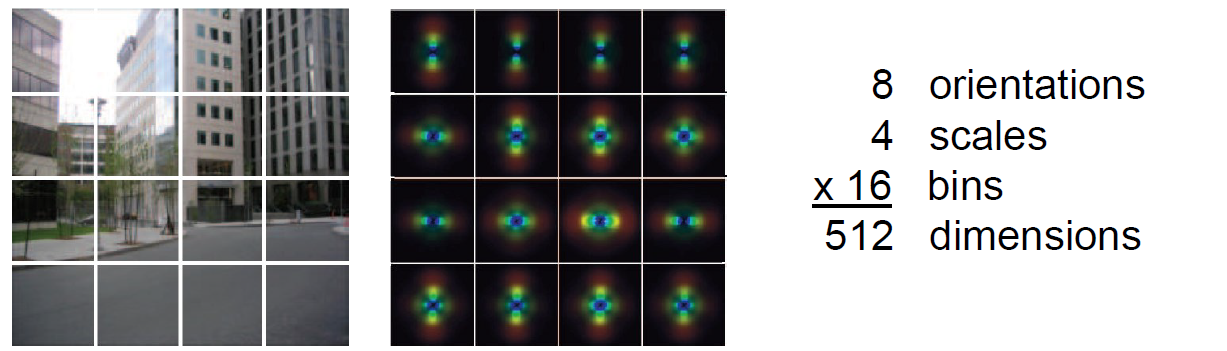
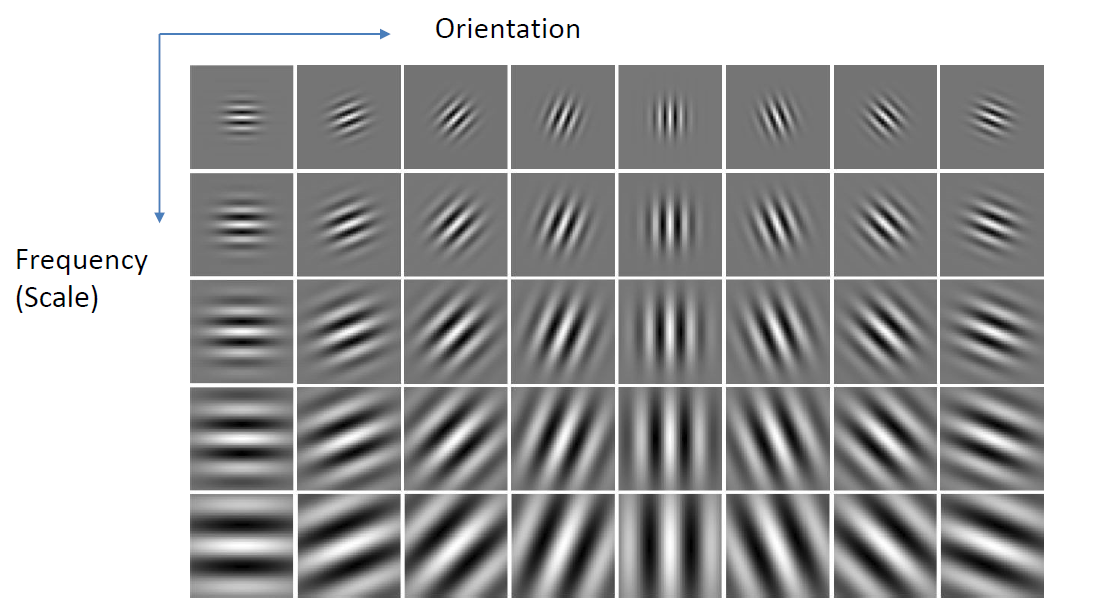
# Gabor滤波器
由高斯内核调制的正余弦波
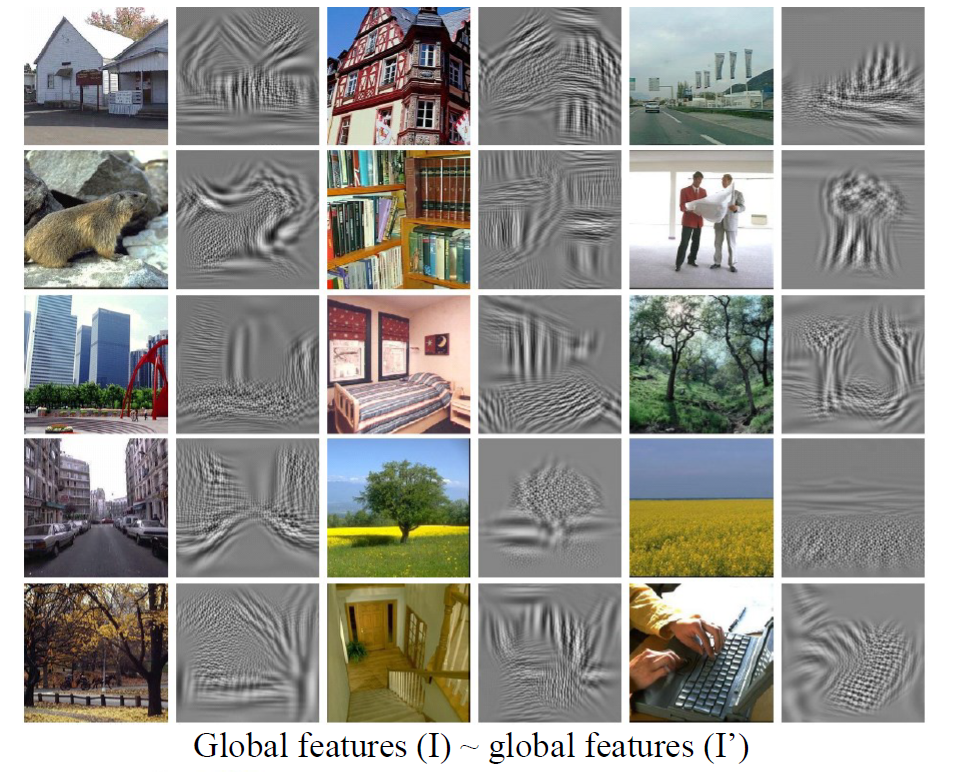
# GIST描述器
8个方向4个不同分辨率16个箱子=512个维度